未来テクノロジー
テクノロジーが拓く、豊かな未来。挑戦し続ける人と企業をクローズアップ
人を危険な作業や苦役から解放し、
南相馬市発の先端ロボット産業を創出する
――株式会社人機一体・金岡博士インタビュー
2025年01月14日




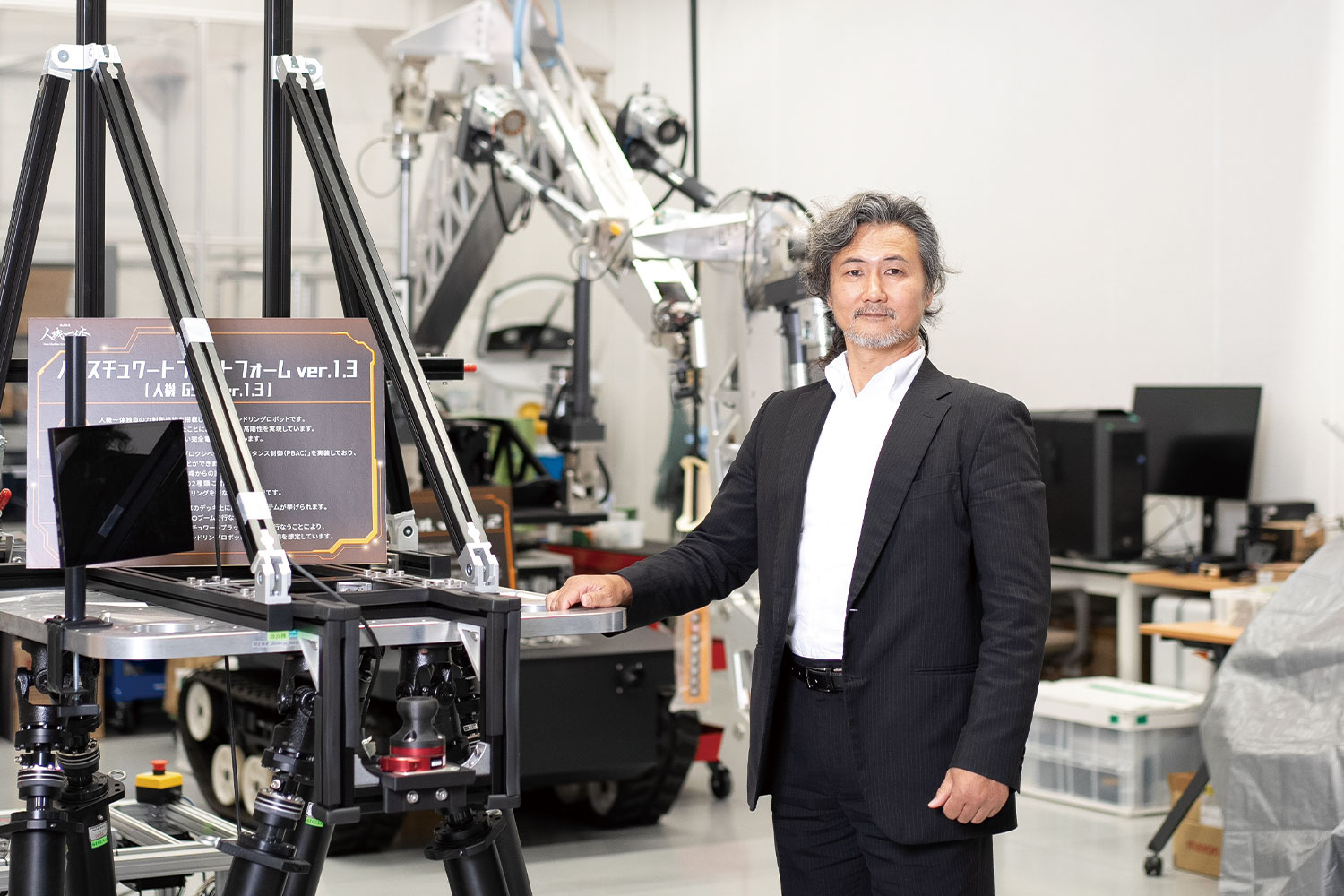
金岡博士
株式会社人機一体 代表取締役 社長
京都大学博士(工学)取得後、立命館大学理工学部ロボティクス学科助手を経て2003年に講師として就任し、2007年にマンマシンシナジーエフェクタズ株式会社を設立。東日本大震災時、ロボット工学技術が現場で十分に活用されていないことに無力感を覚え、事業を本格化することを決意。その決意表明として2015年に商号を株式会社人機一体に変更。今に至る。
アカデミックの世界では、さまざまな先端ロボット工学技術の研究開発が進められているが、実際にはそれらの技術の大半が社会実装されておらず、いまだに多くの人が危険で過酷な作業を強いられている。また激甚災害の復旧現場でも、被災者の期待に反して、ロボットは全くと言っていいほど役立てられていない。そんな現実を目の当たりにし、「あまねく世界からフィジカルな苦役を無用とする」という目標を掲げ、先端ロボットの一大産業化に取り組んでいるのが、人機一体の金岡博士である。
社会実装に向けたさまざまな研究開発や今後目指す未来像について、2021年3月の取材に続き、改めて金岡博士に話を聞いた。
2021年3月取材記事はこちら
―「人機一体」という社名には、どんな思いが込められているのでしょうか。
金岡博士:
人機一体の英表記社名は Man-Machine Synergy Effectors, Inc. で、人と機械の相乗効果を発揮させることを目標としています。単に人の能力を増幅・拡張するだけでなく、人と機械が一体になることによって、人だけではできない、機械だけではできないことをできるようにしたいと考えています。
当社が拠点(福島基地)を置く相馬地方は、いみじくも野馬追(のまおい)でも知られる地であり、その長い歴史を通じて語られてきた“人馬一体”のアナロジーとして、人と機械の新たな可能性を追求しています。
―改めて会社設立の経緯もお聞かせください。
金岡博士:
もともと私がロボット工学研究を行っていた立命館大学発のベンチャー企業として創業したのがスタートです。その後、大学を離れて研究開発の軸足を完全に会社に移したのは、東日本大震災と福島第一原子力発電所の事故がきっかけです。
災害復旧の現場でロボットの活用が望まれましたが、期待に反してロボットは役に立たず、実際に活躍したのは危険を顧みずに現地に赴いた作業者と既存の重機でした。
ここから得た教訓ですが、災害時に役立つロボットを作りたければ、逆説的ではありますが、災害対応のみに特化した開発を行うべきではありません。東日本大震災でなぜ既存の重機が役立ったかといえば、ひとえに社会実装が進んでいることに尽きます。多様な重機を作るメーカーからなる産業があり、メンテナンス体制も確立されており、多くのオペレーターが育成され、日頃からさまざまな現場で経験を積んでいます。要するに平時から活用されるロボットでなければ、災害時に役立つはずがないのです。そんなロボット(=人機)の新たな産業を、当社から生み出していきたいと考えています。

「人機プラットフォーム」の下で苦役をなくすロボットを具現化
―具体的にはどんなビジネスモデルを想定しているのですか。
金岡博士:
当社はいわゆるロボットメーカーではありません。「人機プラットフォーム」と称する企業間コンソーシアムを中心とする新たなビジネスモデルの下、先端ロボット工学技術の知的財産権を武器に、従来技術では解決困難な課題を抱える企業と連携することで、現場の機械化・自動化をビジネスとして推進しています。これにより、人が担っている危険作業や身体負担の重い苦役をなくすロボットを具現化していきます。
単に知財を切り売りするのではなく、さまざまな知財を体系化、統合して、実際に役に立つロボットソリューションを構築・提案し、必要ならばPoC試作機まで作って実証します。その上で、製品を開発するメーカーと連携して技術を供与し、現場で活用できる製品化を進め、さらにはその成果の人機プラットフォーム外への広範な横展開まで見据えた共創プロジェクトを全般にわたってサポートするのが特徴です。
―すでに社会実装の実績もあるのでしょうか。
金岡博士:
当社の先端ロボット工学技術の知財が搭載された初の製品となる多機能鉄道重機が、西日本旅客鉄道(JR西日本)に導入され、2024年7月より実際の営業線での鉄道設備メンテナンスでの運用を開始しました。
JR西日本、日本信号および当社が共同研究開発した高所重作業ロボットのPoC試作機「零式人機ver.2.0」をベースとし、当社が取得している特許技術などのライセンスをメーカーである日本信号に提供することで完成したものです。具体的には架線施設のメンテナンス時における点検、部材交換、重量物運搬、鉄柱の塗装、周囲の支障樹木の伐採などの作業を人手に代わって行います。
背景にあったのは、JR西日本の「鉄道設備メンテナンスにおける高所重作業を解消し、生産性、安全性の向上を図りたい」という強い思いです。特に鉄道の高所架線のメンテナンス作業は墜落や感電などの高い危険性が伴うとともに、作業時間は深夜に限られ、さらに夏は暑く、冬は寒い屋外での作業を強いられる過酷な職場環境にあります。しかも作業者の高齢化が進んでおり、今後の人材不足が懸念されています。
零式人機ver.2.0の完成により、この課題解決に目途が立ちました。オペレーターは高所作業車の地上付近に設けられた室内コックピット内からブーム先端の汎用人型重機を遠隔操作し、先に述べたような作業を行うことができます。危険な高所に上がる必要がなくなり、重量物の運搬作業からも解放されます。現時点で運用を開始した多機能鉄道重機はまだ1台ですが、JR西日本では運用の成果を見つつ、必要に応じて複数台の多機能鉄道重機を順次導入し、現場に投入していくことを目指しています。
 日本信号よりJR西日本に納入された多機能鉄道重機
日本信号よりJR西日本に納入された多機能鉄道重機
写真提供:JR西日本 / 日本信号
―同じ課題はどの鉄道会社も抱えているだけに、多機能鉄道重機の横展開も大いに期待できそうです。
金岡博士:
おっしゃるとおり、どの鉄道会社もほぼ同じ架線施設を所有しており、維持メンテナンスに苦労していますので、JR西日本における成功事例の横展開は次のビジネスに向けた有力なステップとなります。
一方で私たちは、鉄道業界専用のロボットにこだわるつもりはありません。鉄道分野で有用性を示すことができたなら、その高い汎用性を生かし、他業界への横展開を図っていくことがより重要と考えています。具体的には建設、電力、道路、通信といった分野でも高所作業車を使ったメンテナンス作業が行われており、そこにも私たちの先端ロボット工学技術が実装された、多機能鉄道重機をはじめとする多様な「人機」を活用できる可能性があります。
ユーザーとなる業界や企業の裾野を広げることでこそ、ロボットの生産台数を拡大し、人機プラットフォームに参画する各メーカーがしっかり収益を得ることができるマーケットとエコシステムを確立することができるのです。ロボットを一大産業として発展させるためには、この取り組みが絶対に欠かせません。

 人機スチュワートプラットフォームver.1.3
人機スチュワートプラットフォームver.1.3
多機能鉄道重機開発の基礎を支えた福島イノベ機構の支援
―先端ロボット工学技術を一大産業に発展させるという目標に向けた取り組みは、まさにこれからが本番と言えそうですね。そうした中、福島イノベーション・コースト構想推進機構(以下、福島イノベ機構)による支援は、どんな形で役立っていますか。
金岡博士:
福島イノベ機構には、長きにわたり大変お世話になってきました。先にも述べた通り、私が大学の研究者の立場を捨て、ロボット事業に100%専念して取り組もうと意を決したのは、東日本大震災や福島原発事故の現場でロボット工学技術が十分に活用されていないことに無力感を覚えたのがきっかけです。その決意表明として2015年に、会社の商号をマンマシンシナジーエフェクタズから現在の人機一体に変更しました。
もっとも当時の私たちは、福島県とは縁もゆかりも持っていませんでした。そんな当社に対して福島イノベ機構は、福島県の「地域復興実用化開発等促進事業費補助金(イノベ実用化補助金)」(2019~2021年度)の申請に応じてくれたのです。「完全電動でありながら油圧駆動に匹敵する高出力・高耐衝撃性を備えた緩急剛柔自在な力制御が可能な『力逆送型直動ユニット』の開発と重機への実装」という事業計画に対するもので、この補助金のおかげで当社は、のちの多機能鉄道重機にもつながる先端ロボット工学技術の社会実装のための基礎を固めることができました。
また、福島ロボットテストフィールド(RTF)内の研究室への入居、現在の福島拠点を置いている南相馬市産業創造センターへの入居(RTFから移転)、さらには研究員の南相馬市への転居まで、福島イノベ機構が様々な面倒を見てくれました。
―福島イノベ機構による支援は現在も継続しているのでしょうか。
金岡博士:
2022年度には福島イノベ機構の「Fukushima Tech Create(FTC)」のアクセラレーションプログラムに採択され、さらに今年度は「ハイブリッドオートバランス制御技術に基づく不整地二足歩行と全身の自在な遠隔操作が可能な汎用人型重機の開発」という事業計画で、福島県の地域復興実用化開発等促進事業費補助金に再度採択していただくことができました。これらの補助金がなければ、新たな先端ロボット工学技術の開発はもとより、人機プラットフォームによる事業化推進もほとんど不可能でした。
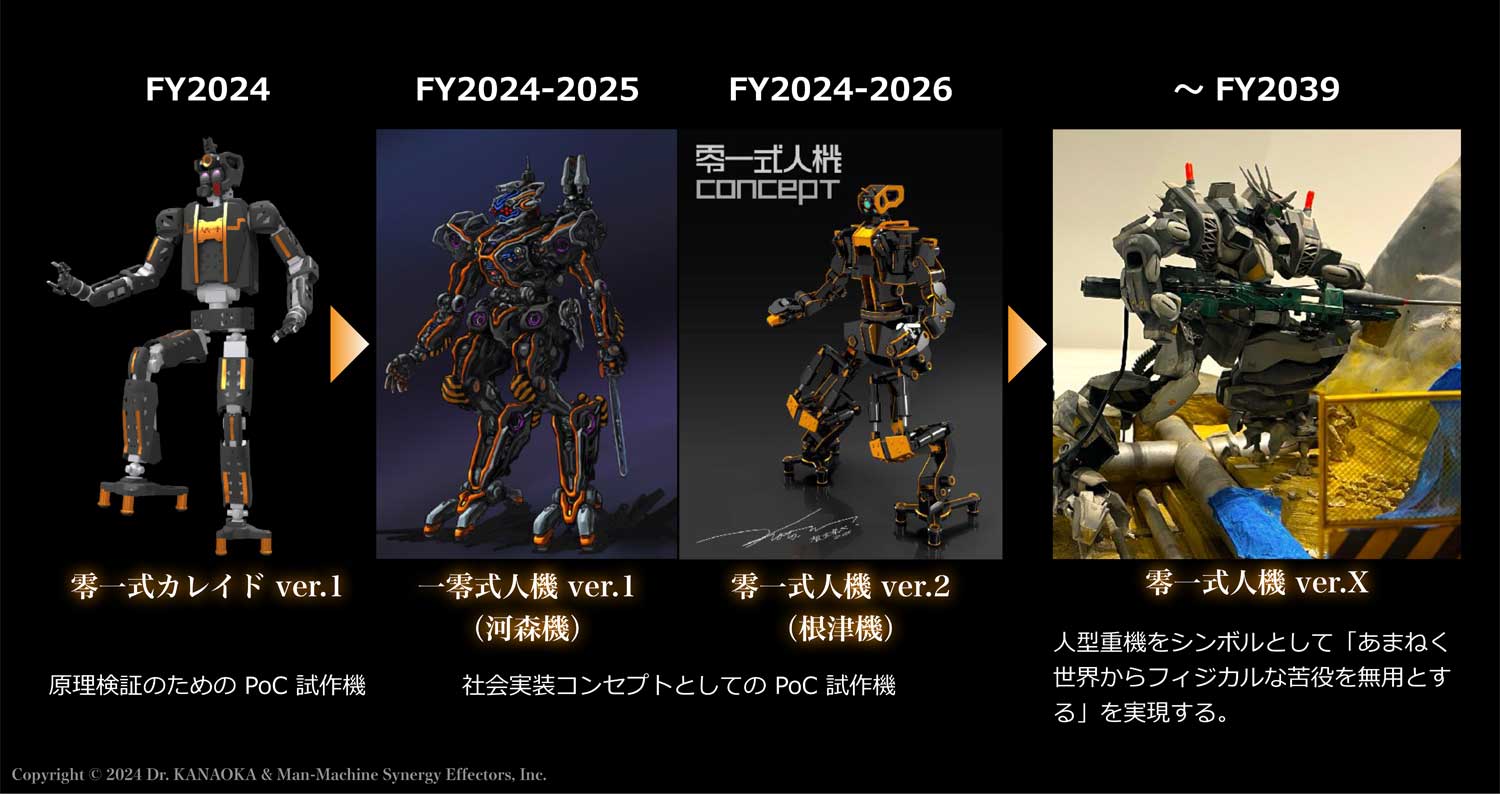 シンボル「人型重機」を作るための開発ロードマップ
シンボル「人型重機」を作るための開発ロードマップ
―補助金以外でも福島イノベ機構の支援があれば教えてください。
金岡博士:
福島イノベ機構に仲介していただいたことで、2022年8月に南相馬市と連携協定を結ぶことができました。「開発する汎用人型重機および完全電動重機等の市内実証場所確保」、「市内の次世代ロボット関連産業の人材育成、市民のロボットに対する社会受容性向上」、「開発における市内企業等との連携・協力」、「南相馬市のロボット開発拠点としての優位性の認知度向上」などの事項に合意したものです。
南相馬市は多くのロボット関連企業が集積しているほか、市としても「地域を挙げてロボット産業を盛り上げていく」という機運を高めており、今後の人機プラットフォームの連携にも弾みが付くと考えています。
―今後、福島拠点を中心としてどんな活動を推進していく計画ですか。
金岡博士:
まだ勝手な妄想レベルですが、福島県が企業誘致を進めている南相馬復興工業団地に当社も拠点を構えたいと考えています。福島ロボットテストフィールドと隣接しており、一体運用が可能であることが最大の優位性です。
人機プラットフォームの下で開発する汎用人型重機をはじめとするロボットは、既存の重機と比べて直感的な操作が可能で、短い訓練でも簡単に扱うことができます。ただしオペレーターの育成が不要というわけではありません。重機である以上、非常に強い力を発して動くため、万一使い方を誤れば人に危害を加える恐れもあります。したがってオペレーターに対しては、安全管理をはじめとする教育をしっかり実施する必要があるのです。
端的に言えば、そうしたロボットの教習所ともいうべきトレーニング施設を南相馬復興工業団地に作りたいのです。これにより多様な用途に向けたロボットの開発からテスト、オペレーターの育成まで一貫して南相馬市で行い、日本全国さらには全世界へサービスやソリューションとして展開していくことが可能となります。
ぜひ実現したいと考えており、福島イノベ機構にも後押しをいただければ幸いです。
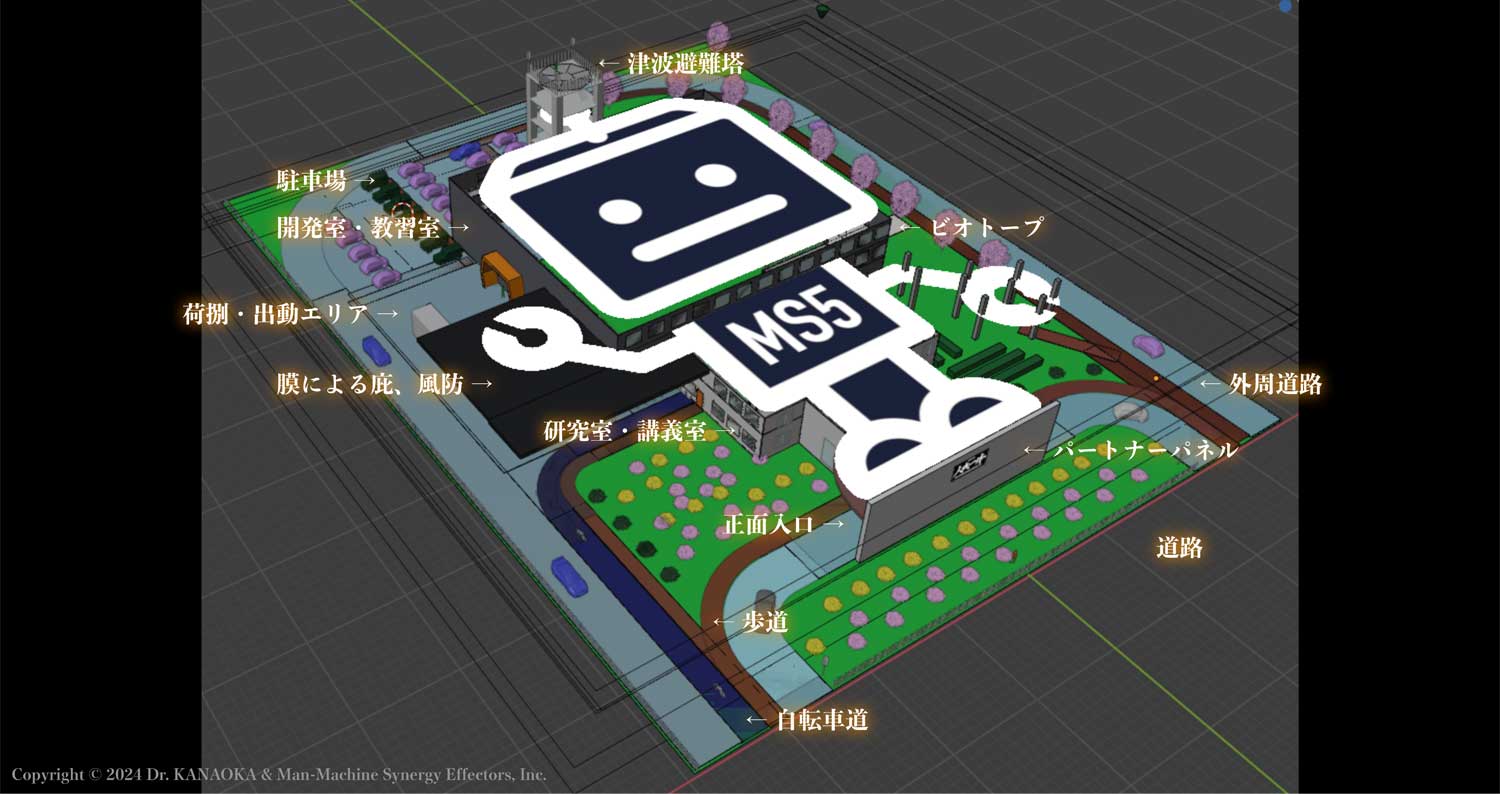 シン・人機一体福島基地:妄想案:衛星写真で見ると
シン・人機一体福島基地:妄想案:衛星写真で見ると
「ミナボくん」(南相馬市のロボット産業PRキャラクター)が見える意匠に
株式会社人機一体
2007年、金岡博士が立命館大学発ベンチャー企業として創業。2015年、株式会社人機一体に商号変更。金岡博士の理念と、力学ベースの先端ロボット工学技術の社会実装によって、「あまねく世界からフィジカルな苦役を無用とする」の実現を目指す。
2024年7月に初の社会実装事例として、西日本旅客鉄道(JR西日本)に日本信号から製品化された「多機能鉄道重機」を導入。今後は高い汎用性を生かして他業界への導入も推進し、ゆくゆくはロボットを一大産業として発展させることを掲げる。滋賀県草津市の秘密基地人機一体(本社)のほか、南相馬市産業創造センターに福島基地を構え、ロボット工学技術の研究開発と社会実装に取り組む。
福島イノベーション・コースト構想推進機構関連:
・平成31年、令和2、3年度「地域復興実用化開発等促進事業費補助金」採択(事業計画名:完全電動でありながら油圧駆動に匹敵する高出力・高耐衝撃性を備えた緩急剛柔自在な力制御が可能な『力逆送型直動ユニット』の開発と重機への実装)
・令和4年度「Fukushima Tech Create」アクセラレーションプログラム採択(事業名:力制御技術を用いた革新的汎用重量物搬送車の開発)
・令和6年度「地域復興実用化開発等促進事業費補助金」採択(事業計画名:ハイブリッドオートバランス制御技術に基づく不整地二足歩行と全身の自在な遠隔操作が可能な汎用人型重機の開発)

おすすめ記事
-
 サステナビリティ
サステナビリティ
2024年01月05日
「メッセンジャーRNA医薬品を
南相馬から世界へ」。
医薬品の新領域でワンストップサービスの実現を目指す
――ARCALIS(アルカリス)・髙松聡氏インタビュー -
 未来テクノロジー
未来テクノロジー
2021年10月18日
限りなく自動化した完全閉鎖型植物工場で
持続可能な近未来の農業をリアルに描く
――A-Plus・沼上透氏インタビュー -
 サステナビリティ
サステナビリティ
2023年01月27日
水素エネルギー活用の現在地とは?
第一人者・NEDO大平英二氏が見据える「2050年」の姿
――「福島水素エネルギー研究フィールド」(FH2R)を構える「福島」への期待 -
 サステナビリティ
サステナビリティ
2023年11月17日
「廃炉で磨かれた技術を次世代の産業に」。
浜通りに拠点を構え、ダイヤモンド半導体の社会実装に挑む
――大熊ダイヤモンドデバイス・星川尚久氏、金子純一氏インタビュー