

大水槽を活用したROVナビゲーション実証試験
■実施日:2024年6月6日~7日
■実施者:株式会社水龍堂、株式会社海洋先端技術研究所
■使用施設:屋内水槽試験棟(大水槽)
■実施内容
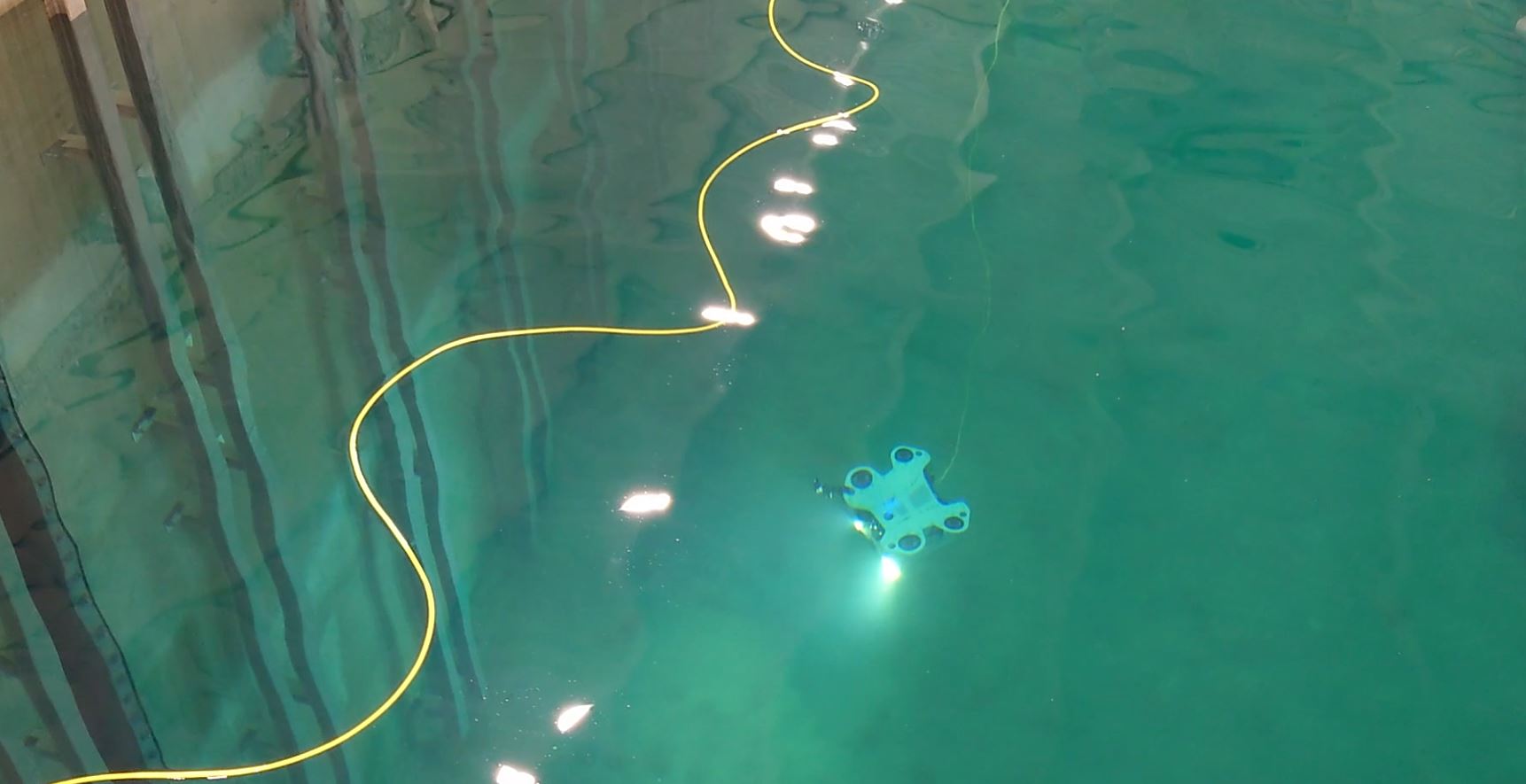
福島ロボットテストフィールドの大水槽及び音響測位システムを活用し、ドップラー速度ログ(DVL)搭載型ROVの航行支援ソフトウェアの検証試験を実施した。試験には株式会社水龍堂の「龍頭」と福島ロボットテストフィールドのBlueROV2を利用した。
試験では実際に大水槽内を航走し、音響測位システム及びドップラー速度ログ(DVL)から推定された機体位置と実際の位置との整合性等を確認し、ソフトウェア開発にフィードバックすることを目的としている。
■実施結果と今後の展望
機体の航走距離に関しては良好な結果が得られた。
一方、機体の方位(磁石)については大水槽の鉄骨等の影響により計測した機体の方位にずれが生じた。次回試験に向け、この原因を分析している。



計測機材 オブジェクト撮影の様子 音響測位の様子


壁面撮影の様子 音響測位システム「μPAP」 DVL搭載型ROV「龍頭」